SafeSmart – säkerhet för uppkopplade intelligenta fordon i smarta städer
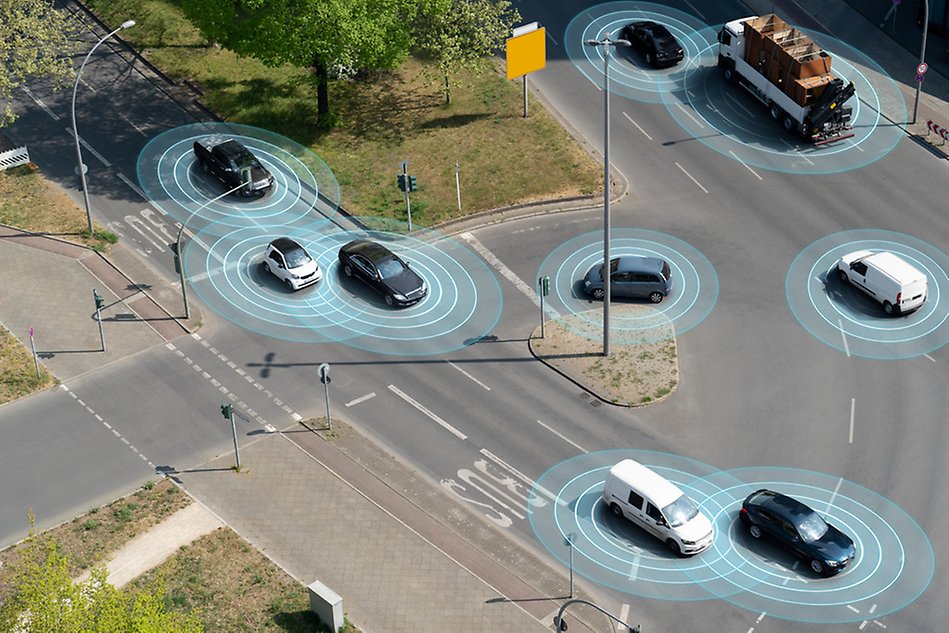
Detta projekt syftar till att utveckla tekniska framsteg som möjliggör automatiserad körning i utmanande urbana scenarier, till exempel i en korsning med utsatta trafikanter.
Ledande aktörer inom bilindustrin inför för närvarande mer intelligens i fordonen för att öka nivån på fordonsautomatisering. Society of Automotive Engineers (SAE) kategoriserar körautomatiseringssystem i fem nivåer som sträcker sig från frigörandet av endast specifika förarfunktioner under specifika körförhållanden, till drift var som helst och när som helst utan att föraren behövs. Befintliga toppmoderna marknadslösningar når automationsnivå 4 endast för helt segregerade styrbanor (till exempel specialzoner på flygplatser). Uppdaterade körhjälpsystem med begränsad åtkomst på motorväg faller inom automationsnivå 2. För stadsmiljöer finns endast nivå 1-system (till exempel körfältsassistans).
Att möjliggöra tillförlitligt samarbete mellan fordon är en avgörande komponent för att närma sig problemet. Kooperativa och adaptiva farthållare för att eliminera stötvågor, automatiserad inkörning i samma körfält, start utanför siktlinjen, att få ett jämnt flöde i trafiken, hastighetsharmonisering för att maximera flödet, och hastighetsreduktion när man närmar sig köer för ökad säkerhet är exempel på prestanda som bara kan uppnås genom samarbete. Därför blir uppkopplingsmöjligheter en avgörande del av framtida autonoma fordon, medan nuvarande lösningar uteslutande förlitar sig på icke-samarbetande datorseende paradigm. Mot denna bakgrund definierar vi den övergripande forskningsfrågan för detta projekt som:
- Vilka är de tekniska framstegen som krävs för att garantera säkerheten för sårbara trafikanter (VRU) vid kooperativa korsningar?
För att ta itu med denna fråga har vi analyserat den senaste tekniken, tagit reda på de kunskaper som saknas och föreslagit en forskningsagenda för att fylla luckan. Valet av forskningsfrågorna motiveras av de nödvändiga och lämpliga framstegen inom autonom körning:
- Först och främst måste man upptäcka och lokalisera sårbara trafikanter (fotgängare, cyklister). Förekomsten av sårbara trafikanter, som inte nödvändigtvis har möjligheten att kommunicera, är stadsmiljöns främsta utmärkande drag i jämförelse med motorvägar eller förorter. Befintliga tillvägagångssätt är endast begränsade till det fall då optisk synlighet mellan fordonet och sårbara trafikanter antas. Därför studerar delprojektet SL (Sensing & Localization) sätten att upptäcka och lokalisera dem vid korsningar när sikten skyms.
- För det andra är samarbetet mellan fordonen endast möjlig när den pålitliga kommunikationen mellan fordonen finns på plats. Vanligtvis förutsätter stadsmiljö många kommunicerande fordon i närheten. Även om befintliga fordonskommunikationstekniker ger acceptabel prestanda med ett dussin kommunicerande fordon uppstår prestandaproblemen i scenarier med väldigt tät stadstrafik. Därför studerar delprojektet CC (Communication & Collaboration) sätten att hantera radioresurser i korsningar med tät fordonstrafik, där intensiva ömsesidiga störningar förekommer.
- För det tredje, givet att de två första framstegen är på plats, bör en automatisk kontrollalgoritm för att passera korsningen säkert utformas. Besluten kommer att baseras på den information som finns tillgänglig från både lokaliseringssensorerna (om omgivande sårbara trafikanter) och kommunikationssensorerna (om andra fordon). Varje automatiserat fordon bör styra sig själv, så att den resulterande trafiken kan garanteras vara säker, vilket kommer att vara i fokus för delprojektet DC (Decision & Control).
SafeSmart är en del av Högskolan i Halmstads KK-miljö Forskning för innovation. Målet för SafeSmart i detta sammanhang är att stärka Högskolan i Halmstads profilområde Smarta städer och samhällen. Detta ska uppnås genom att bygga vidare på Högskolan i Halmstads långsiktiga samarbete med fordons- och IKT-sektorerna inom svensk industri. Smart mobilitet är en viktig hörnsten i framtidens smarta städer, vilket också uppmärksammas i den europeiska samhällsutmaningen – smarta, gröna och integrerade transporter.
Om projektet
Projektperiod
- 1 september, 2019–31 august, 2023
Projektledare
- Alexey Vinel, professor, PhD, synergikoordinator, CC-projektledare
- Wojciech Mostowski, docent, PhD, TI-projektledare
- Johan Thunberg, PhD, DC-projektledare
Samverkanspartner
- AstaZero
- Scania
- H&E Solutions
- Gutec
- Quviq
- Luxoft
Finansiärer
- KK-stiftelsen
